- Ардуино и шаговый двигатель: основы, схемы, подключение и управление
- Подключение шагового двигателя к Arduino Uno
- Общие принципы работы шаговых двигателей
- Расчет шагов на оборот для шагового двигателя
- Зачем нужен драйвер мотора для управления шаговым двигателем
- Работа схемы
- Разработка программы для платы Arduino
- Работа проекта
- Исходный код программы
- Видео, демонстрирующее работу схемы
Ардуино и шаговый двигатель: основы, схемы, подключение и управление
Шаговые двигатели используют для управления положением чего-либо, или для вращения рабочего узла с заданной скорости и на заданный угол. Такие особенности сделали возможным его применение в робототехнике, станках с числовым программным управлением (ЧПУ), и других системах автоматизации. В этой статье мы рассмотрим ряд вопросов связанных с устройством шаговых двигателей и способами их управления с помощью микроконтроллера Arduino.
Шаговый двигатель отличия от обычного
Все используемые на практике электродвигатели работают за счет электродинамических явлений и процессов происходящих в магнитных полях роторов и статоров. Как мы уже упомянули, любой двигатель состоит как минимум из двух частей – подвижной (ротор) и неподвижной (статор). Для его вращения нужно чтобы и магнитное поле тоже вращалось. Поле ротора вращается вслед за полем статора.
В принципе, таких базовых сведений достаточно для понимания общей картины работы электрических двигателей. Однако на самом деле промышленность производит различные варианты электродвигателя, среди которых:
1. Асинхронный двигатель с короткозамкнутым или с фазным ротором.
2. Синхронный двигатель с обмотками возбуждения или с постоянными магнитами.
3. Двигатель постоянного тока.
4. Универсальный коллекторный двигатель (работает и на постоянном токе и на переменном, ведь обмотки ротора сами подключаются и отключаются от контактов источника питания за счет конструкции ламелей и якоря).
5. Бесщеточные двигатели постоянного тока (BLDC).
7. Шаговые двигатели.
Последние два вида несут особую ценность, благодаря возможности их, в определенной степени, точного позиционирования в пространстве. Давайте подробнее рассмотрим конструкцию шагового двигателя.
Определение
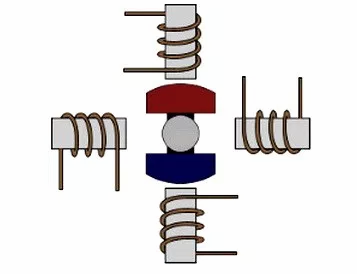
Шаговым двигателем называется бесщеточный электродвигатель синхронного типа. На статоре расположено определенное число обмоток, подключение которых вызывает поворот ротора на определенный угол, зависящий от числа шагов. Другими словами ток в обмотке статора вызывает поворот вала на дискретный угол.
При равномерной и последовательной смене полярностей напряжения на обмотках и переключении запитанных обмоток происходит вращение шагового двигателя, подобно обычному электродвигателю, хотя на самом деле просто происходит регулярный поворот на фиксированный угол.
Шаговый двигатель иногда называют двигателем с конечным количеством положений ротора. Звучит не совсем понятно, давайте разберемся. Представим обычный двигатель – положение его ротора никак не фиксируется, то есть он просто вращается пока подключено питание, а когда оно отключается, то останавливается через какое-то время, зависящее от его инерции. Положений ротора может быть сколько угодно много, а отличаться они могут на мельчайшие доли градуса.
В шаговом двигателе подключение обмотки или нескольких обмоток вызывает «примагничивание» ротора по отношению к этим обмоткам. Внешне это выглядит именно как поворот вала на определенный угол (шаг). Так как количество шагов является одной из важных характеристик этого типа электропривода, то и количество положений ротора равно количеству шагов. Новичкам сложно понять, как это может быть, и как он в таком случае вращается – на самом деле все достаточно просто, мы это покажем на иллюстрациях и описаниях ниже.
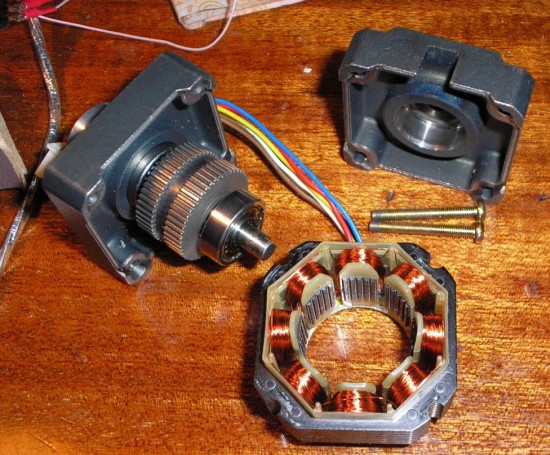
Конструкция
На статоре электродвигателя закреплены обмотки возбуждения. Его ротор выполняется из магнитомягких или магнитотвердых материалов. От материала ротора зависит крутящий момент и фиксация вала при обесточенных обмотках. Эти параметры могут быть критичными.
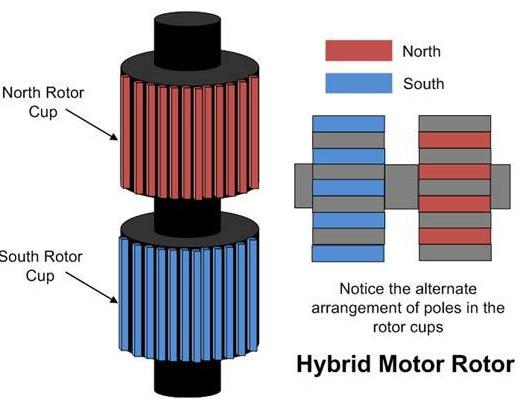
Поэтому выделяют магнитотвердые роторы (они же на постоянных магнитах) и магнитомягкие (реактивные) роторы, кроме них есть и гибридные роторы.
Гибридный ротор делают зубчатым, количество зубцов соответствует количеству шагов. Зубцы расположены вдоль оси ротора. При этом такой ротор разделен на две части поперек. Между ними установлен постоянный магнит, таким образом, каждая из половин ротора является полюсом магнита. Также следует сказать, о том, что половины ротора повернуты на половину шага зубцов друг относительно друга.
Как уже было сказано, такой двигатель является синхронным, так и процесс его вращения заключается в создании вращающего поля ротора, за которым стремится магнитный ротор, а это реализовывается за счет переключения контроллером обмоток поочередно.
Виды шаговых двигателей ШД по конструкции обмоток делят на три основных группы по схеме подключения обмоток:
3. С четырьмя обмотками.

Биполярные электродвигателя в большинстве своем имеют 4 контакта – это выводы с двух обмоток. Внутри двигателя они по большому счету никак не соединены между собой. Основной проблемой является то, что нужно обеспечить переключение полярности питания, это значит, что драйвер и сам процесс управления усложнится.
Униполярные напоминают соединение обмоток по схеме звезды. Другими словами, у вас есть 5 выводов – 4 из них это концы обмоток, а 1 – точка соединения всех обмоток.
Для управления таким двигателем нужно просто подавать поочередно питание на каждый из концов обмотки (или их пару, в зависимости от выбранного режима вращения), таким образом будет запитываться каждый раз половинка обмотки. Может работать в биполярном режиме, если запитывать полностью всю обмотку минуя отвод от её середины.
Двигатели с 4 обмотками имеют преимущество в том, что вы можете подключить обмотки любым удобным для вас образом и получить как биполярный, так и униполярный двигатель.
Режимы управления
Различают 4 основных режима управления шаговым двигателем:
1. Волновое управление.
Волновым управлением называют управление одной обмоткой. Т.е. одновременно ток течет через одну из обмоток, отсюда две отличительных черты – низкое энергопотребление (это хорошо) и низкий крутящий момент (это плохо).
В данном случае этот двигатель делает 4 шага за один оборот. Реальные же двигатели делают десятки шагов за один оборот, это достигается бОльшим количеством чередований магнитных полюсов.
Полношаговое управление является наиболее часто используемым. Здесь напряжение подается не на одну обмотку, а на две сразу. Если обмотки соединены параллельно – то ток удваивается, а если последовательно, то удваивается напряжение питания соответственно. С одной стороны в таком методе управления двигатель потребляет больше энергии, с другой – крутящий момент 100%, в отличие от предыдущего.
Полушаговое управление интересно тем, что становится возможным более точное позиционирование вала двигателя, благодаря к тому, что к целым шагам добавляются еще и половинки это достигается совмещение предыдущих двух режимов работы, а обмотки чередуются, то включаясь попарно, то по одной.
Стоит учесть, что момент на валу плавает от 50 до 100% в зависимости от того 1 или 2 две обмотки задействованы в данный момент.
Еще более точным является микрошаговый. Он похож на предыдущий, но отличается тем, что питание на обмотки подаётся не полной величины, а постепенно изменяющейся. Таким образом, изменяется степень воздействия на ротор каждой из обмоток и плавно изменяется угол поворота вала в промежуточных шагам положениях.

Где взять шаговый двигатель
Купить шаговый двигатель вы успеете всегда, но настоящие радиолюбители, самодельщики и электронщики славятся тем, что могут из мусора сделать что-то полезное. Наверняка, у вас дома найдется хотя бы один шаговый двигатель. Давайте разберемся, где нужно искать, чтобы найти такой двигатель.
1. Принтера. Шаговые двигатели могут стоять на вращении вала подачи бумаги (но может быть и двигатель постоянного тока с датчиком перемещения).
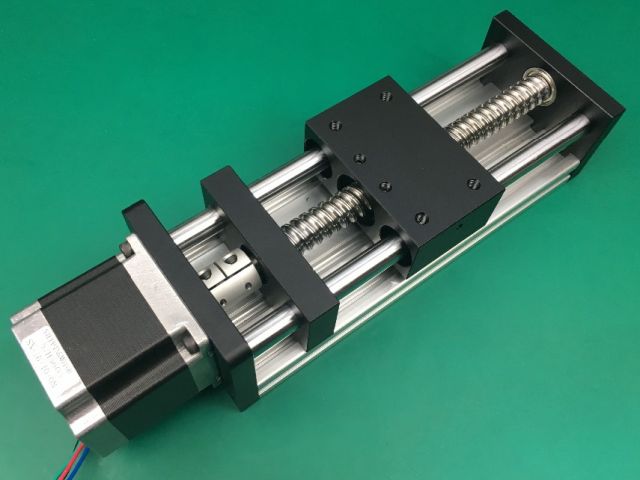
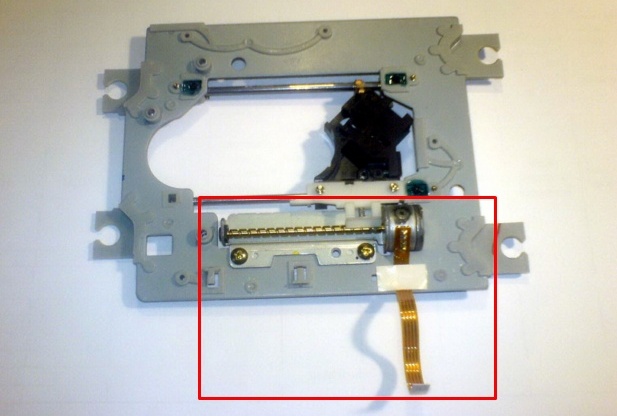
2. Сканеры и МФУ. В сканерах часто устанавливают шаговый двигатель и механическую часть, направляющую вдоль которой ходит каретка, эти детали также могут стать полезны при разработке самодельного ЧПУ станка.
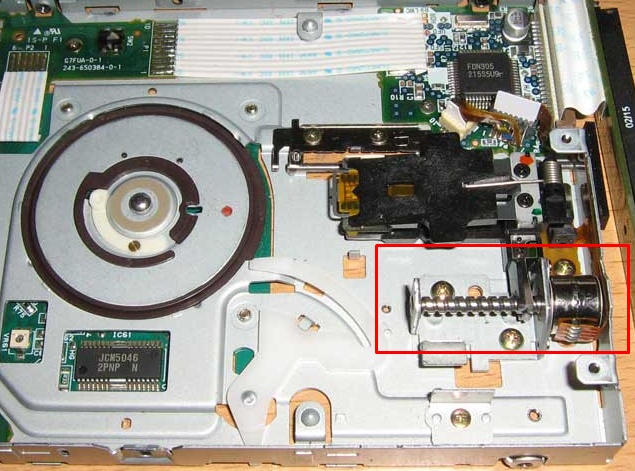
3. CD и DVD приводы. В них также можно достать и штанги и винтовые валы для самоделок и различных ЧПУ.
4. Floppy-дисководы. В дискетниках также есть шаговые двигатели, особо ценятся флопики формата 5.25”.
Драйвер для шагового двигателя
Для управления шаговыми двигателями используют специализированные микросхемы-драйвера. В большинстве своем это H-мост из транзисторов. Благодаря такому включению появляется возможность включать на обмотку напряжение нужной полярности. Эти микросхемы подходят и для управления двигателями постоянного тока с поддержкой изменения направления вращения.
В принципе очень маленькие двигателя можно запустить и прямо от пинов микроконтроллера, но обычно они выдают до 20-40 мА, чего в большинстве случае недостаточно. Поэтому приведем несколько примеров драйверов для шаговых двигателей:
1. Платы на базе L293D. Их множество, одна из таких продается под отечественной маркой «Амперка» под название Troyka Stepper, пример его использования в реальном проекте приведен на видео ниже. Преимущество конкретно этой платы в том, что на ней расположены микросхемы логики которые позволяют сократить количество используемых для управления пинов.
Сама по себе микросхема работает под напряжение 4.5-36В и выдает ток до 600мА-1А в зависимости от корпуса ИМС.
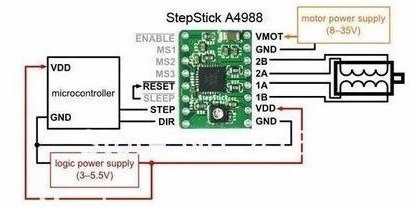
2. Драйвер на базе A4988. Питается напряжением до 35В, выдерживает ток до 1А без радиатора, а с радиатором до 2А. Может управлять двигателем, как целыми шагами, так и частями – от 1/16 шага до 1 шага, всего 5 вариантов. Содержит два H-моста. С помощью подстроечного резистора (видно на правом фото) можно задавать выходной ток.
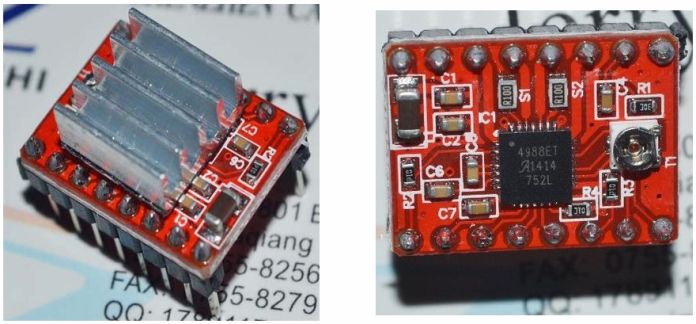
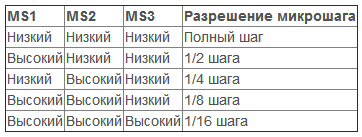
Размер шага задается сигналами на входах MS1, MS2, MS3.
Вот схема его подключения, каждый импульс на входе STEP задает поворот двигателя на 1 шаг или на микрошаг.
3. Драйвер на базе ULN2003 работает с двигателями на 5 и на 12В и выдаёт ток до 500 мА. На большинстве плат расположены 4 светодиода индицирующих работу каждого из каналов.
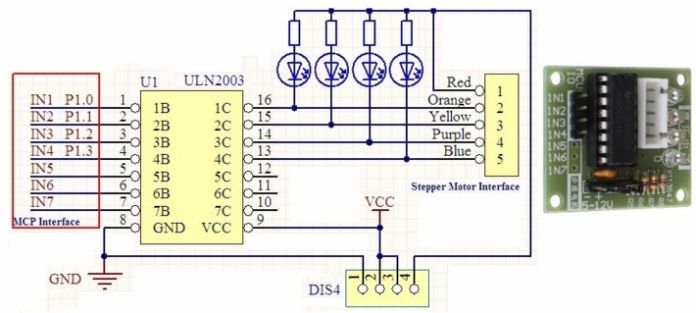
Также на плате вы можете видеть клеммную колодку для подключения двигателей, кстати, многие из них продаются именно с таким разъёмом. Примером такого двигателя является 5В модель – 28BYJ-48.
И это не все варианты драйверов для шаговых двигателей, на самом деле их еще больше.
Подключение к Arduino драйвера и шагового двигателя
В большинстве случаев нужно использовать микроконтроллер в паре с драйвером для шагового двигателя. Давайте рассмотрим схему подключения и примеры программного кода. Рассмотрим подключение на базе последнего приведенного драйвера – ULN2003 к плате Arduino. И так у него есть 4 входа, они подписаны, как IN1, IN2 и т.д. Их нужно соединить с цифровыми пинам платы ардуино, а к драйверу подсоединить моторчик как показано на рисунке ниже.
Далее в зависимости от способа управления вы должны подавать на входы 1 или 0 с этих пинов включая 1 или 2 обмотки в нужно последовательности. Код программы полношагового управления выглядит примерно так:
Подключение шагового двигателя к Arduino Uno
Шаговые двигатели с каждым годом находят все большее применение в мире электроники. Начиная от обычной камеры наблюдения до сложных станков с ЧПУ и роботов шаговые двигатели используются в качестве исполнительных механизмов, поскольку они обеспечивают точное управление. В этом проекте мы рассмотрим один из наиболее распространенных шаговых двигателей 28BYJ-48 и его подключение к плате Arduino с помощью модуля ULN2003.

Общие принципы работы шаговых двигателей
Внешний вид шагового двигателя 28BYJ-48 представлен на следующем рисунке:

Первый вопрос, который напрашивается при взгляде на этот рисунок – почему в отличие от обычного двигателя из этого шагового двигателя выходят 5 проводов различных цветов? Чтобы понять это давайте сначала разберемся с принципами работы шагового двигателя.
Начнем с того, что шаговые двигатели не вращаются, а “шагают”, поэтому они и называются шаговыми двигателями. То есть в один момент времени они будут передвигаться только на один шаг. Чтобы добиться этого в устройстве шаговых двигателей присутствует несколько катушек и на эти катушки нужно подавать питание в определенной последовательности чтобы двигатель вращался (шагал). При подаче питания на каждую катушку двигатель делает один шаг, при последовательной подаче питания на катушки двигатель будет совершать непрерывные шаги, то есть вращаться. Давайте более подробно рассмотрим катушки, присутствующие внутри шагового двигателя.
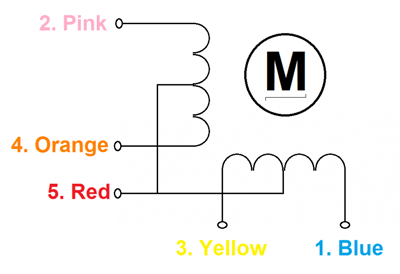 Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Как можно видеть из рисунка, двигатель имеет однополярную катушку с 5 выводами. Но фактически это 4 катушки, на которые нужно подавать питание в определенной последовательности. На красные провода необходимо подать +5V, на остальные 4 провода необходимо подать землю чтобы запустить в работу соответствующую катушку. Мы будем использовать плату Arduino чтобы подавать питание на эти катушки в определенной последовательности и тем самым заставлять двигатель вращаться. Более подробно ознакомиться с принципами работы шаговых двигателей можно в статье про подключение шагового двигателя к микроконтроллеру AVR.
Так почему же этот двигатель называется 28BYJ-48? Честно говоря, мы не знаем точного ответа на этот вопрос. Некоторые наиболее важные технические характеристики этого шагового двигателя приведены на следующем рисунке.
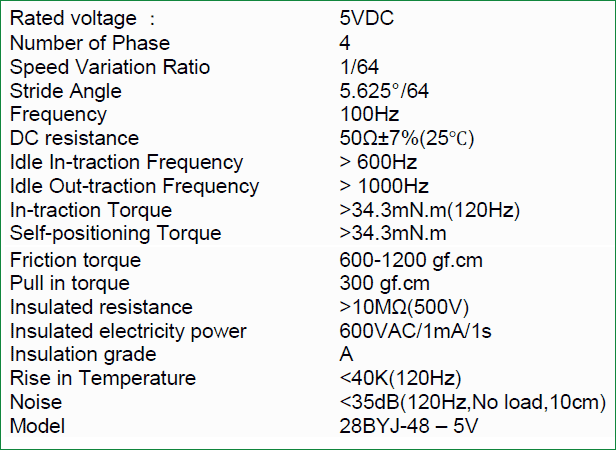
На первый взгляд от такого количества характеристик может закружиться голова, но давайте попробуем выделить из них самые важные, те, которые нам понадобятся для дальнейшей работы. Во-первых, мы знаем, что это шаговый двигатель 5V, поэтому необходимо подавать на красный провод 5V. Также мы знаем что это четырехфазный шаговый двигатель поскольку в нем четыре катушки. Передаточное число этого двигателя — 1: 64. Это означает, что вал, который вы видите снаружи, сделает одно полное вращение в том случае, когда двигатель внутри сделает 64 оборота. Это происходит благодаря шестерням, которые включены между двигателем и выходным валом. Эти шестерни помогают в увеличении крутящего момента.
Еще одним важным показателем, который нам следует знать, является угол шага: 5.625°/64. Это значит что когда двигатель сделает последовательность в 8 шагов он будет поворачиваться на 5.625° при каждом шаге и за один полный оборот он сделает 64 шага (5.625*64=360).
Расчет шагов на оборот для шагового двигателя
Важно знать, как рассчитать количество шагов за один оборот для вашего шагового двигателя, потому что только тогда вы можете эффективно его запрограммировать.
В Arduino для управления двигателем мы будем использовать 4-шаговую последовательность, поэтому угол шага будет составлять 11.25°. Поскольку изначально он равен 5.625°(приведен в даташите), то для 8 шаговой последовательности получим 11.25° (5.625*2=11.25).
Справедлива следующая формула:
Количество шагов за оборот = 360 / угол шага.
В нашем случае 360/11.25 = 32 шага за оборот.
Зачем нужен драйвер мотора для управления шаговым двигателем
Большинство шаговых двигателей будут работать только с помощью модуля драйвера мотора. Это связано с тем, что микроконтроллер (в нашем случае плата Arduino) не может обеспечить достаточный ток на своих контактах ввода/вывода для работы двигателя. Поэтому мы будем использовать внешний драйвер мотора для управления нашим шаговым двигателем — модуль ULN2003 (купить на AliExpress). В сети интернет можно найти рейтинги эффективности различных драйверов мотора, но эти рейтинги будут меняться в зависимости от типа используемого шагового двигателя. Основной принцип, которого следует придерживаться при выборе драйвера мотора – он должен обеспечивать достаточный ток для управления шаговым двигателем.
Работа схемы
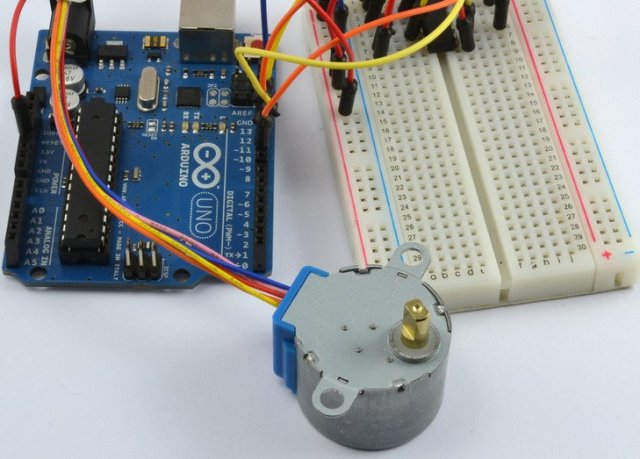
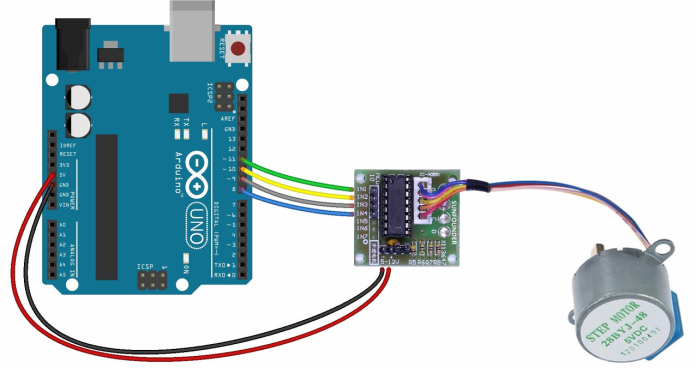
Схема подключения шагового двигателя к плате Arduino представлена на следующем рисунке.
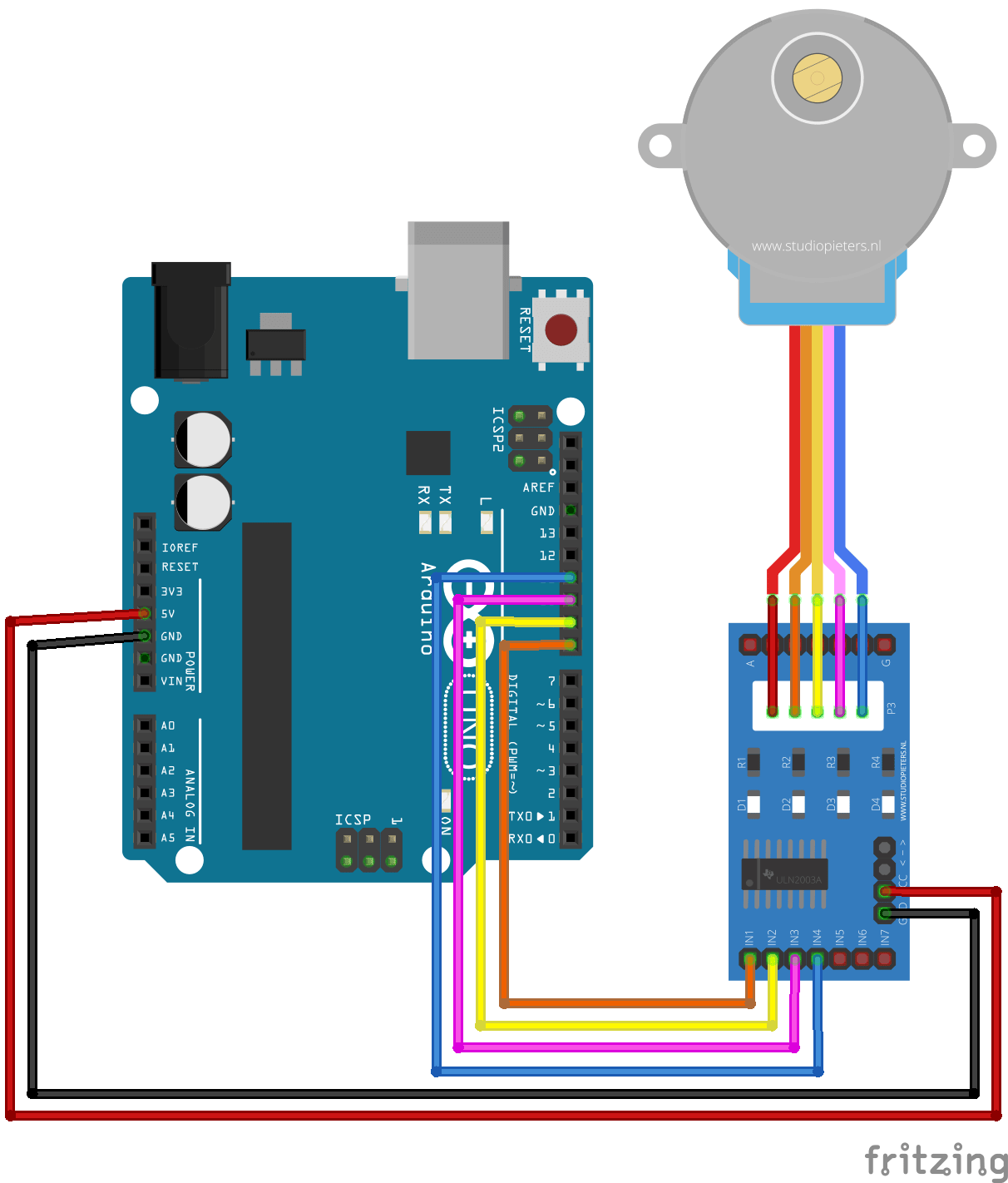
Мы использовали шаговый двигатель 28BYJ-48 и драйвер мотора ULN2003. Для подачи питания на 4 катушки шагового двигателя мы будем использовать контакты платы Arduino 8, 9, 10 и 11. Драйвер мотора запитывается от контакта 5V платы Arduino.
Но если вы будете подсоединять какую-нибудь нагрузку к шаговому двигателю, то вам потребуется внешний источник питания для драйвера мотора. Мы в нашем примере эксплуатируем шаговый двигатель без нагрузки, поэтому нам и хватило питания от платы Arduino. И не забудьте соединить землю платы Arduino с землей драйвера мотора.
Разработка программы для платы Arduino
Перед тем как начать писать программу для платы Arduino давайте разберемся что должно происходить внутри этой программы. Как мы уже говорили ранее, мы будем использовать метод 4-шаговой последовательности, то есть нам нужно будет сделать 4 шага чтобы выполнить один полный оборот двигателя.
| Номер шага | Контакты, на которое подается питание | Катушки, на которое подается питание |
| Шаг 1 | 8 и 9 | A и B |
| Шаг 2 | 9 и 10 | B и C |
| Шаг 3 | 10 и 11 | C и D |
| Шаг 4 | 11 и 8 | D и A |
На драйвере мотора есть 4 светодиода, по свечению которых можно судить о том, на какую катушку подается питание в конкретный момент. Более подробно все эти процессы можно посмотреть в видео, приведенном в конце статьи.
Мы напишем программу, в которой необходимое количество шагов для двигателя мы будем вводить в мониторе последовательного порта (serial monitor) платы Arduino. Полный текст программы приведен в конце статьи, здесь же мы рассмотрим наиболее важные его фрагменты.
Как мы рассчитали ранее, полное число шагов для полного оборота нашего шагового двигателя, равно 32, пропишем это в следующей строчке кода:
#define STEPS 32
Далее мы должны сказать плате Arduino через какие ее контакты мы будем управлять шаговым двигателем (то есть к каким ее контактам подключен драйвер мотора).
Stepper stepper (STEPS, 8, 10, 9, 11);
Примечание : последовательность номеров контактов, указанная в приведенной команде (8,10,9,11) – специально упорядочена таким образом чтобы подавать питание на катушки шагового двигателя в правильном порядке. Если вы измените номера контактов, к которым подключен шаговый двигатель, то вы соответствующим образом должны их упорядочить для подачи в приведенную команду.
Мы будем использовать специальную библиотеку для работы с шаговыми двигателями, поэтому для задания скорости вращения шагового двигателя мы можем использовать команду вида:
Для двигателя 28-BYJ48 скорость вращения можно установить в диапазоне от 0 до 200.
Теперь, чтобы двигатель сделал один шаг, мы можем использовать следующую команду:
Количество шагов, которое должен сделать двигатель, определяется переменной “ val ”. Поскольку мы имеем 32 шага (для оборота) и передаточное число 64 мы должны сделать 2048 (32*64=2048) “шагов” в этой команде для совершения одного полного оборота двигателя.
Значение переменной “val” в нашей программе мы будем вводить из окна монитора последовательной связи.
Работа проекта
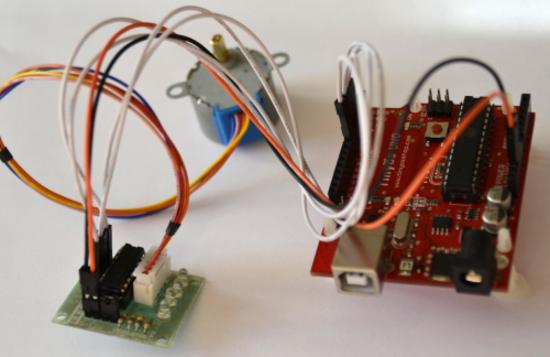
Когда вы сделаете все необходимые соединения в аппаратной части нашего проекта у вас должна получиться примерно следующая конструкция:

Теперь загрузите код программы в плату Arduino UNO и откройте окно монитора последовательной связи (serial monitor). Как мы уже указывали, мы должны сделать 2048 шагов для совершения одного полного оборота, то есть если мы в окне монитора последовательной связи введем 2048, то вал шагового двигателя совершит один полный оборот по часовой стрелке, а сам двигатель в это время сделает 2048 шагов. Для вращения против часовой стрелки просто вводите нужное число шагов со знаком “–“. То есть если вы введете -1024, то вал мотора совершит пол-оборота против часовой стрелки. Чтобы протестировать работу проекта вы можете вводить любые числа.
Исходный код программы
Код программы достаточно простой. Я надеюсь после успешной реализации данного проекта вы сможете управлять любыми шаговыми двигателями с помощью платы Arduino.
#include // заголовочный файл библиотеки для работы с шаговыми двигателями
// измените необходимое число шагов в зависимости от модели вашего шагового двигателя
#define STEPS 32
// создайте класс для шагового двигателя и запишите для него правильную последовательность контактов
Stepper stepper(STEPS, 8, 10, 9, 11);
int val = 0;
void setup() <
Serial.begin(9600);
stepper.setSpeed(200);
>
void loop() <
if (Serial.available()>0)
<
val = Serial.parseInt();
stepper.step(val);
Serial.println(val); //for debugging
>
>